
Autogire - Piloter pour le plaisir, étudier un système de drone, découvrir une bergeronnette
Mis à jour le 23/08/2023
Une affectation au Centre d’Etudes Tactiques et d’Expérimentations de l’Artillerie en 1982 à Draguignan me permet d’étudier les possibilités de l’ULM et plus particulièrement de l’autogire pour la mise en place et la relève des observateurs dans la profondeur du champ de bataille.
Le vol devant se faire à basse altitude, un logiciel de navigation baptisé MELUSINE (1) fonctionnant sur un des premiers micro-ordinateur “cube” Macintosh relié à des récepteurs LORAN C (2) et GPS (3) est développé pour visualiser sa position sur des cartes numérisées défilant sur l’écran.
Le travail simultané sur un porteur aérien type “AUTOGIRE”, sur un système de “POSITIONNEMENT-NAVIGATION” par GPS-LORAN, sur des moyens “d’ACQUISITION” par caméra thermique et télémétrie laser, sur un Centre de Coordination et d’Acquisition avec les moyens de transmissions associés et sur les problèmes d’interopérabilité CI (4) permet de concevoir progressivement les bases d’un système de drone ACQUISITION.

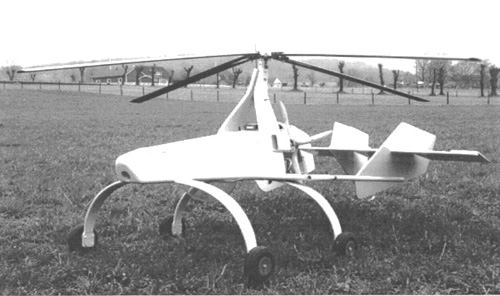
Autogire “Butterfly”
Après avoir volé sur plusieurs types différents d’autogire, je peux noter que l’avantage de l’autogire par rapport à l’ULM 3 axes est d’une part, d’être moins coûteux (construction amateur) et d’autre part, d’être plus facile à poser par vent fort; dans ce cas, la trajectoire à l’arrivée pouvant être aussi verticale que celle d’un parachutiste arrivant sous son “aile”, le plus simple est de se mettre face au vent et de se laisser descendre pour se poser pratiquement sans rouler.
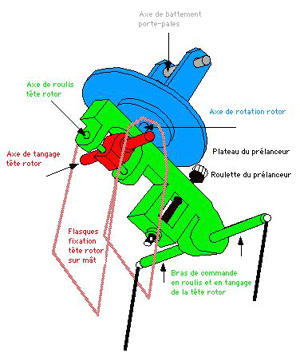
Tête rotor”
Son inconvénient majeur est que la machine est “suspendue” à la tête rotor (4 axes: axe de rotation du rotor qui tournant en "autorotation" dans le vent relatif joue le rôle d'une aile circulaire, axes de roulis et de tangage qui permettent le pilotage de cette aile circulaire avec le manche, axe de battement du porte-pales du rotor pour tenir compte de la différence de portance entre pale avançante et pale reculante) qui doit être très solide. En cas de panne du moteur de l'hélice propulsive, le gros avantage par rapport à l'hélicoptère est que le rotor est par construction en autorotation; il suffit donc de trouver un terrain "ad-hoc" dans un rayon de 3 à 4 fois la hauteur de vol pour s'y poser en conservant avec le manche la vitesse de puissance minimum.
Pendant la navigation MELUSINE enregistre chaque position à la cadence d’une seconde pour pouvoir analyser le vol “au chaud”. Les essais se font d’abord avec le récepteur LORAN C double chaîne de MLR puis avec le premier GPS de l’époque, le TANS de Trimble; le seul problème rencontré est de trouver une place sans vibration pour fixer l’antenne du Loran.
Déchargé des soucis de l’estime permanente nécessaire au vol à basse altitude pour savoir où l’on est, les navigations GPS avec une vue “fish eye” au dessus des premiers contreforts des Pyrénées deviennent extraordinaires. En “voyage”, les posers réguliers dans des prairies repérées à l’avance pour refaire le plein à partir de nourrices de 20 litres laissées par les épouses des pilotes se font sans aucune difficulté.
Le compte-rendu au Chef d’Etat Major de l’Armée de Terre est très favorable à la poursuite des essais dans cette voie.
* *
En 1990, ce moyen aérien et son système de navigation ont peu de partisans - le voyage en autogire est “venté” et le GPS est “américain” -, je me décide donc à entrer dans la branche “Navigation - Défense” d’un industriel de l’armement.
A l’époque, c’est la première guerre en IRAK avec l’opération “Desert Storm”; c’est, pour certains responsables, la découverte forcée du GPS. Côté Etats-Unis, France et Suède , ce sont les apparitions des premiers systèmes d’observation par drone.
MIDGET RPG suédois
En 1996, j’étudie le système suédois MIDGET Remotely Piloted Gyroplane. Ayant dans mes 700 heures de vol (avions monomoteurs, hélicoptères légers, planeurs) environ 20 heures sur autogire, je suis déjà convaincu que l’autogire est un bon porteur possible pour du matériel d’acquisition destiné à des missions de reconnaissance et de surveillance “au contact”. Le télépilotage d’un autogire est d’autre part beaucoup plus facile à réaliser que celui d’un hélicoptère.
Continuant à travailler sur le GPS et les moyens hybrides de navigation, par hasard, je suis amené à proposer à un pilote d’Air France, devant voler pendant ses vacances pour le Paris - Dakar, d’équiper son avion avec le GPS “maison”; en contre-partie, il m’autorise à mettre un gigantesque autocollant portant le logo de ma société sur le fuselage de son appareil. En fin d’installation dans un hangar de l’aérodrome du Bourget, en attendant de pouvoir faire un vol d’essai, je décide d’aller visiter le musée de l’Air et de l’Espace.
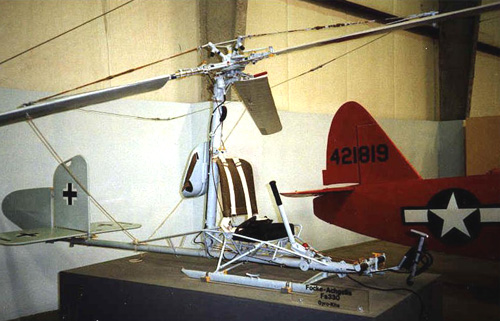
FOCKE ACHGELIS 330 “Bachstelze”
Là, ô surprise, je tombe en arrêt sur une “bergeronnette” (Bachstelze) en vol sous le plafond. Il s’agit de l’autogire Focke Achgelis 330 “Bachstelze”, construit en 200 exemplaires et mis en service à partir de 1943 sur les sous-marins de la classe Monsun de la Kriegsmarine (type IX D 2 de 87,6 m de long, jaugeant 1804 m3) déployés dans l’océan Indien et l'Atlantique Sud moins fréquentés par l'aviation alliée.
Les premiers pilotes ont été formés à la soufflerie de Chalais-Meudon à partir d’une plate-forme recouverte de caoutchouc; l’entrainement normal se faisait en deux étapes: 1ère étape, à Geinhausen, sur un Fa 330 équipé d’un train à 2 roues et tracté par un véhicule à moteur; 2e étape, sur mer derrière un bateau à moteur équipé d’une plate-forme de décollage sur la plage arrière.
La notice présentant cet autogire me fait tout de suite rêver..
“Les pièces détachées de ce Fa 330 étaient, à bord d’un sous-marin, contenues dans deux réservoirs cylindriques - 2 tubes lance-torpilles; n°1 pour le rotor, n°2 pour le fuselage - d’un volume total ne dépassant pas 2 mètres cubes.”
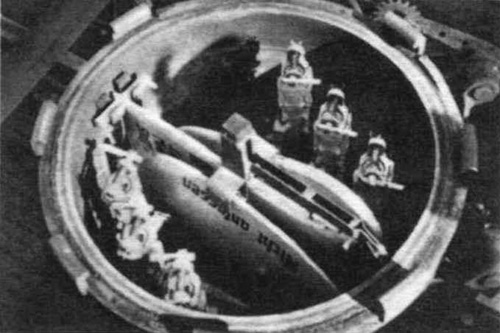
Tube lance-torpille avec rotor tripale démonté de FA 330
“Deux mécaniciens suffisaient pour exécuter son assemblage sur le pont du submersible.

FA 330 sur sa plate-forme de lancement
(partie arrière du kiosque d’un U-Boote type IX D 2)
Suivant la force du vent, le rotor pouvait être lancé à la main ou avec un cable entouré autour de la tête du rotor.

FA 330 en vol au dessus de son sous-marin
(tout le monde est sur le pont pour respirer l’air pur et voir le ciel bleu)
“Au fur et à mesure de la progression du sous-marin en surface, le rotor tournait de plus en plus vite et dès que le nombre de tours par minute était de l’ordre de 160/200, le Fa 330 pouvait commencer à quitter le pont, les attaches des skis étant alors enlevées, et lors du vol, le cable, dont la longueur pouvait largement dépasser une centaine de mètres, devait demeurer à un angle constant - de 45° - . L’atterrissage s’effectuait d’une manière inverse, le cable s’enroulant jusqu’à ce que le planeur autogire revienne sur le sous-marin où deux hommes le maintenaient sur place tandis que le pilote freinait le rotor. En vol d’observation, les liaisons entre le pilote et le sous-marin se faisaient par téléphone.”

Pilote de FA 330 avant le prélancement du rotor
(le mécanicien et le guetteur ont le sourire)
“En cas d’incident au-dessus de la mer, le pilote avait pour consigne de tirer sur un levier qui éjectait le rotor et simultanément détachait le FA 330 de son cable de remorquage. Un parachute était alors utilisé et l’amerrissage pouvait se faire en toute sécurité après une descente à la vitesse de 6 à 7 m/s depuis 40 mètres de hauteur.”
Caractéristiques générales: longueur: 4,47 m; hauteur: 1,67 m; diamètre du rotor: 7,30m; poids à vide: 68kg
* *
En pensant au drone suédois qui indique en temps réel au “chef opérations” du régiment “au contact” la présence ou non d’un ennemi dans la future zone d’action et au FA 330 allemand dont le pilote à 100 mètres au dessus de l’eau donnait par téléphone au commandant du sous-marin le cap et la distance du prochain bateau à couler dans un rayon de 10 km, je fais passer à mes chefs trois idées simples pour un système de drone à courte portée:
1 - l’autogire a pratiquement tous les avantages de l’hélicoptère sans ses inconvénients, en particulier
niveau télépilotage : le posé presque ponctuel comme avec un parachute type aile assure une bonne fiabilité dans les opérations de récupération du drone avec sa charge utile,
niveau vol : le vol très stable dans les turbulences à basse altitude assure de bonnes images et la gamme des vitesses - 25 à 150 km/h - offre beaucoup de possibilités en terme de missions,
niveau mécanique : le pas fixe de 2,5° (pas de mécanique rotor) permet une maintenance facile,
niveau emport : le diamètre du rotor et la motorisation peuvent être choisis en fonction de la charge à emporter en conservant la même cellule de base;
2 - l’autogire, grâce à sa plage importante de vitesse horizontale, peut passer rapidement de “l’éclairage” sur un axe de 50km à de “l’investigation” dans une zone de 10km sur 10km;
3 - l’autogire est un des porteurs “possibles” pour un système d’ACQUISITION “modulable” à concevoir en fonction des missions et des liaisons à établir avec le système C4I2 (5) du niveau supérieur.
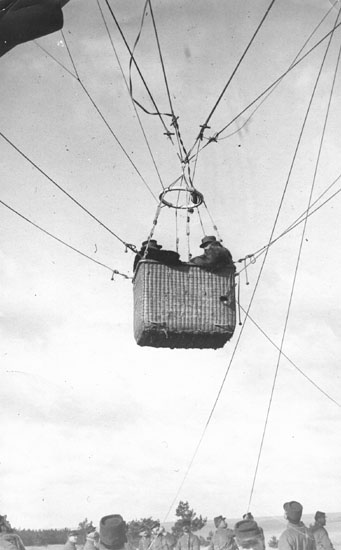
Muizon - 25 Février 1915 - Ballon Caquot au décollage
Gal Franchet d’Espèrey et Cne Arbelot de la 23e compagnie d’aérostier
Le passage des ballons d’observation type Caquot de l’artillerie en 1915 aux drones et autres UAV (6) de 2008 montrent les progrès réalisés en matière d’acquisition du renseignement.

Vitry-les-Reims - 29 Février 1915
Eclatements de DCA autour d’un Morane de la MS12 en reconnaissance
(photographie faite par un des deux avions qui escortait le Morane où avait pris place le général Franchet d’Espèrey qui voulait voir “de visu” le degré d’avancement des tranchées allemandes)
Grâce aux systèmes de drone de reconnaissance, la vie des pilotes n’est plus exposée aux tirs sol-air; inconvénient mineur, ils ont moins l’occasion de boire du champagne. En effet, le 29 Février 1915, suite à une reconnaissance mouvementée, les annales de l’escadrille MS 12 rapportent que le général Franchet d’Espèrey avait été mis à l’amende d’une caisse de champagne par le commandant du Service aéronautique de la Ve armée, le capitaine de Rose, pour avoir détérioré en partie les ailes de son Morane en volant au milieu des éclats d’obus qu’il voulait voir de trop près... !
* *
Il est temps de revenir sur terre. Si le lecteur a l’occasion de passer dans le Sud-Ouest de la France du côté du terrain de Bois de la Pierre (voir site de Xavier Averso www.averso-aviation.com) entre St-Gaudens et Toulouse, je lui conseille vivement de s’y arrêter; il y retrouvera ces “merveilleux fous volants” qui réalisent, chaque fin de semaine, un de mes vieux rêves: voler sur autogire en sécurité, la tête à l’air pour le plaisir, avec une vision “fish eye” accompagnée de sensations agréables dans les “fesses” et dans le “cerveau”.
Il comprendra mieux pourquoi les équipages de sous-marins allemands devaient être fort contents - voir le sourire du matelot mécanicien et du guetteur aux jumelles sur la photo n°7 - de pouvoir embarquer un ou deux pilotes d’autogire avec leurs “drôles de machines”: grâce à eux, de temps en temps, ils avaient la possibilité de sortir, de respirer et de revoir le ciel bleu...!
__________
1 - MELUSINE : Module d’Equipements de Localisation Utilisant des Structures et des Informations NumériséEs; ce module fonctionne toujours fort bien en 2010 (iBOOK et OS 9.2; GPS Geko 201 de Garmin; GPS Valsat de MLR) avec des cartes scannées “maison” (le seul problème est de connaître le système géodésique de référence utilisée par la carte, ce qui n’est pas forcément évident si elle est achetée dans certains pays exotiques).
2 - LORAN C : LOng RAnge Navigation system type C ; donne un point à 500 mètres près, sauf au lever et au coucher du soleil, sur terre et en particulier sur toute l’Europe, grâce à un type de récepteur dit “double chaîne” qui peut capter des émetteurs de réseaux complémentaires.
3 - GPS : entre 1981 et 1987, il n’y a que peu de satellites opérationnels; les créneaux avec 3 satellites sont rares; un point x,y,z ne peut donc être obtenu en permanence; pour faire les essais “3D”, il faut prévoir les créneaux à l’avance et le travail la nuit est normal, ce qui parfois provoque la surprise des gendarmes voyant à 3 heures du matin une voiture garée au bord de la route avec un écran illuminé présentant une carte avec un plot de position; le prix du GPS est très élevé à l’époque, de l’ordre de 18.000 euros (120 KF).
4 - CI : Computer, Interoperability
5 - C4 I2: Command, Control, Communication, Computer, Intelligence, Interoperability
6 - UAV : Unmanned Aerial Vehicle = aéronef sans contrôle humain à bord
CDG:-)
PS: Merci de donner remarques, idées ou le bonjour en cliquant ci-dessous:
christian.degastines@orange.fr
Retour à SOMMAIRE