
Photogrammétrie - Pod photo Nikon D3200 et Sony A6000 à axe vertical autostabilisé pour hélicoptère ULM "Kompress" et autogire "Xenon"
Hung Optic Pod - Wireless Intervalometer Command
HOP WIC
Mis à jour le 14/05/2026
1 - CONCEPTION

21/04/2015 - Azy-sur-Marne - EXIF DSC0101.jpg: F/5.6, ISO 560 Focale 105mm, Vitesse 1/2.500
Zoom 30% sur matériel de construction: bétonneuse, parpaings, brouette
- Kompress: hauteur AGL 1700ft (510m), altitude QNH 1900ft, vitesse sol GPS 51kt (59mph)
GSD = 2 cm/pixel
HOP WIC sans plateforme stabilisée produit automatiquement des photos "presque verticales" non stéréoscopiques (pas de recouvrement) dont la qualité permet une identification avec un GSD compris entre 2 et 3 cm/pixel (voir photo ci-dessus).

07/04/2015 - Un bout d'Azy-sur-Marne reconstruit en 3D par "PhotoScan" utilisant 6 photos se recouvrant et dont les axes optiques restent "verticaux" pendant 5 secondes
Si le Nikon est fixé au pod, son axe optique bouge en "Roulis - Tangage" et les photos prises à la cadence de 1 seconde ne conservent pas le même axe "vertical". Au bout de 5 secondes, l'axe vertical change d'orientation avant qu'il ne soit corrigé en "Roulis" et "Tangage"par le pilote.
Au dépouillement, à cause de ce changement d'orientation, le logiciel de photogrammétrie "PhotoScan" ne peut pas retrouver les points homologues lui permettant de reconstruire le terrain 3D à partir des photos verticales se recouvrant. Il faut donc stabiliser automatiquement la suspension du Nikon en "Roulis - Tangage" pour conserver vertical son axe optique pendant que le pilote maintient face au vent la vitesse sol (Vs au GPS) calculée pour le recouvrement souhaité.
Les différents éléments de la plateforme ont été
Étude plateforme HOP: anneau de rideau (plateau "roulis") porte le Nikon et glisse dans 1/2 rond (plateau "tangage") d'une cloison de caisse de Bordeaux;
la cloison contenant le 1/2 rond pivote sur le haut du cône; l'ensemble permet de trouver le positionnement et les dimensions des éléments du montage à la cardan

Plans 3D sous Rhino (formats .obj, .mtl,.jpg) pour impression 3D par "Sculpteo": chapeau, cylindre support bàti cardan, bâti cardan "roulis" "tangage"
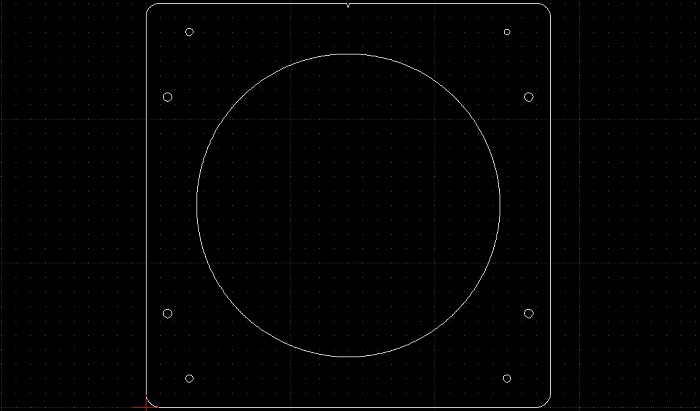
Plan 2D sous LibreCad (format .dxf) pour découpage par "John Deer": plaque de portage en aluminium

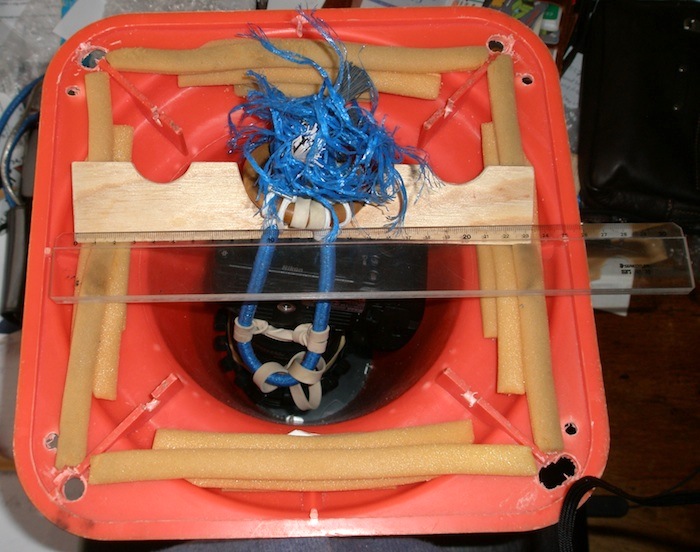
Plateforme HOP pour Nikon D3200: vue de dessus sans chapeau ni plaque de portage
Base du cône (raccourci en hauteur de 50cm à 17, 20 ou 25cm en fonction de la focale) de signalisation en position haute
4 coins de la base tenus par 4 vis sur plaque de portage en aluminium fixée sous le moteur sur le chassis de l'hélico

Plateforme HOP pour Sony A6000 (Février 2017)
Le débattement possible de l'axe optique du D3200 (focale 50mm) en "roulis" et "tangage" par rapport à l'axe du cône (hauteur 17cm), la base étant sur un plan horizontal, est:
- de ±8° en tangage;
- de 8° en roulis à D;
- de 10° en roulis à G, afin de tenir compte du fait que l'hélico vole en palier à Vs constante légèrement penché à gauche (couple des forces appliquées au centre de gravité et au centre de poussée).
Partie HOP
Le Nikon D3200 est suspendu par sandows dans une plateforme à cardan autostabilisée 2 axes (fourche "Roulis", fourche "Tangage") par le poids de l'appareil (1kg).
Les photos verticales stéréoscopiques à réaliser par bandes parallèles sont prises automatiquement à la cadence de 1 seconde (intervallomètre externe si Nikon D3200; interne si Nikon D750).
Au début de chaque bande, l'opérateur déclenche le Nikon dans son pod sous le moteur, par télécommande à partir du cockpit.
Partie WIC
Les télécommandes "wireless" disponibles en 2015-2016 pour le Nikon sont:
- WiFi: applications WMU pour téléphones portables (iPhone 6 par exemple) dans le cockpit:
--------- WMU Nikon D3200 + récepteur WU-1a sur Nikon dans le pod;
--------- WMU CamRanger + récepteur CamRanger sur Nikon D750 dans le pod; particularités: avec le Nikon D750, tous les réglages sont accessibles depuis iPhone avec passage possible du mode "photo" au mode "vidéo";
- 2.5Ghz: intervallomètre Hähnel Giga T Pro II avec transmetteur dans le cockpit et récepteur sur Nikon D3200 dans le pod (voir 2 photos ci-dessous).
2 - RÉALISATION

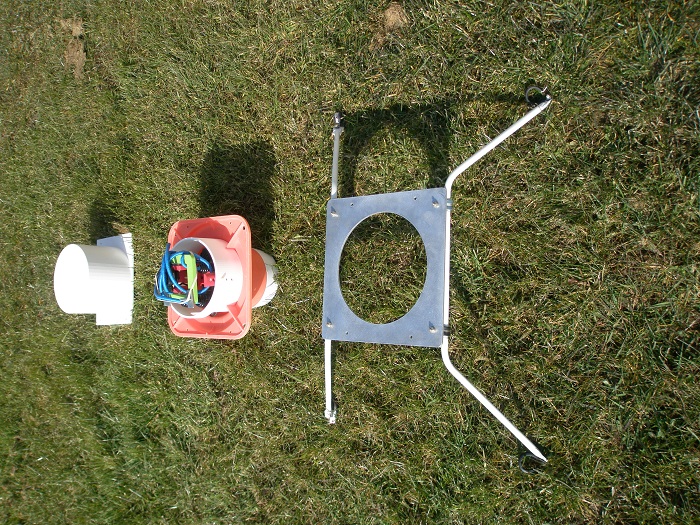
Eléments du HOP démontés et vus de côté
Cône plastique (Lon 28 x Lar 28 x Ht 17, 20 ou 25cm) avec Nikon dans plateforme autostabilisée, plaque de portage aluminium (28x28x0.4cm; avec évidement circulaire ∅21cm), chapeau plastique de protection (Lon28xLar21.5xDia21xHt14.5cm);
Nikon D3200 et récepteur intervallomètre Hähnel suspendus par 4 sandows dans plateforme autostabilisée "Roulis" (rouge) et "Tangage" (vert);
Collerette (blanche) encastrée entre 4 contreforts du haut du cône, porte la plateforme;
Plaquettes de 20g sur cadre "Tangage" pour équilibrer la suspension
14/03/16 - Aérodrome de Champ Cadet
HOP D3200 pour focale 50mm encadré par chapeau en plastique blanc (à G) et plaque de portage en aluminium (à D) fixée sur 2 ponts (tube acier ∅13mm)
Colliers "aéro" DG14 (vis ∅ 4.8mm) tiennent plaque de portage en aluminium à ses 4 coins sur 2 ponts fixés sur le chassis via d'autres colliers "aéro"
Assiette plaque de portage peut être réglée par inclinaison des ponts au montage sur chassis
Parties avant plaque de portage et HOP repérées par encoche
HOP montable à la demande sur plaque de portage par 4 vis ∅6mm avec rondelles et écrous à oreilles; hors mission photo, le Kompress vole sans HOP
Nikon peut être ainsi réglé et installé en salle dans HOP dont le hublot doit être nettoyé avant chaque vol

14/03/16 - Aérodrome de Champ Cadet
Eléments du HOP focale 50mm assemblés
Chapeau en plastique blanc (hauteur 15cm) + Plaque aluminium 5mm + Cône (hauteur 17, 20 ou 25cm en fonction focale choisie) + Hublot en verre 4mm (∅142mm)
Chapeau et cône sont fixés par 4 vis ∅6mm à la plaque de portage qui reste à demeure sous le moteur

08/09/2015 - Champ Cadet - Heli Light ULM - ULM hélicoptère "Kompress" équipé "HOP-WIC" sous la Boite de Transfert Principal
Vibrations: néant en déplacement au sol (translation à 1.50m du sol); en l'air: néant sur reconstruction 3D; POD est au CDG

24/11/2016 - Epernay Plivot - Giro Aventures - ULM autogire "Xenon" équipé "HOP-WIC" sous la partie arrière du moteur
Vibrations: roulage à faire doucement sur piste non en dur; en l'air: parasites visibles sur reconstruction 3D; POD monté sur 2 poutres de queue est en arrière du CDG;
plaque aluminium portant POD à monter sur 4 amortisseurs (morceaux de tuyau de caoutchouc) pour réduire les vibrations transmises par les poutres de queue
3 - ESSAIS
31 - A terre: Validation autostabilisation plateforme et recherche des meilleurs paramètres pour le Nikon D3200: mode "S" ou mode "P"; qualité image "Fine" ou "Normal".
A partir de la balustrade métallique d'un balcon,
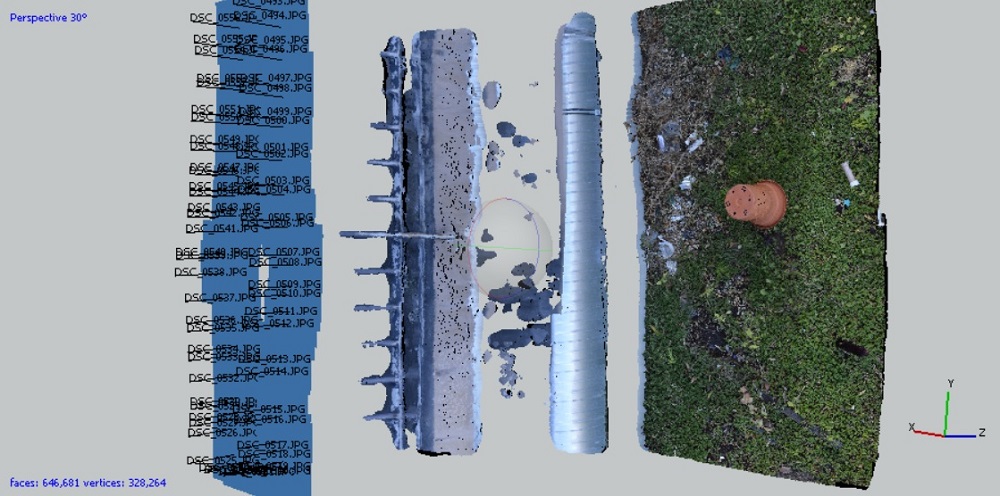
L'indication Perspective 30° en haut et à G de l'écran de PhotoScan , indique que le calcul 3D de la position et de l'orientation des photos verticales est optimisé pour un Field Of View de 30° (FOV=2ATAN(Dim Capteur/2F)(180/PI)); soit par exemple focale 50mm et capteur CMOS de 27mm de côté. Les dimensions du CMOS sur le Nikon D3200 sont: 23.2mm x 15.4mm.
PhotoScan utilisé avec Nikon D3200 et focale
- 50mm (FOV 26°) produit un "terrain 3D" exploitable au niveau impression 3D; un bon éclairage sans ombre portée par l'objet à reproduire donne un objet sans trou; le résultat des opérations "Alignement", "Nuage" avec filtrage profondeur "Modéré", "Maillage" et "Texture" est optimum (temps de calcul, aspect final) avec le choix de calcul "Moyen";
- 70mm (FOV 19°) fait apparaître, en fin d' "Alignement", une courbure dans le plan vertical de la trajectoire horizontale suivie par le pod pendant la prise de vue verticale;
- 105mm (FOV 13°) aligne correctement les photos mais ne peut restituer les parois obliques du pot de fleur car le FOV est trop faible pour saisir les parois verticales.
311 - Mode "S" (speed): opérateur choisit à l'avance une vitesse (1/1600).

Paris 17/02/16 - 14h (soleil et ombre portée) - Focale 50mm, 400 ISO, Mode vue par vue, Vitesse 1/1600, priorité Speed, Auto Focus: zône dynamique, Image: qualité JPEG fine & taille Large - 30 photos prises (12 à 14 MO la photo)
Terrasse vue de dessus: conduit aluminium, pot de fleur renversé sur herbe et gravier
Deux bandes de 15 photos (rectangles bleus), prises sur hippodrome en U à cadence 1 seconde à 2.60m de haut - Repères de début et fin de bande = sur balustrade, 2 morceaux de scotch blanc espacés de 1.50m
Bande terrain 3D exploitable impression 3D à échelle 1/50 (0.05/2.60): longueur 2.60m, largeur 1.30m

Focale 50mm - Vue de profil - Flancs verticaux du pot de fleur au soleil sont sans trous; partie à l'ombre, quelques trous
Paris 19/02/16 - 10h30 (soleil sur terrasse mais pas encore arrivé sur le pot) - Focale 50mm, 400 ISO, Mode continu (2 images / seconde), idem autres paramètres- 60 photos prises (12 à 14 MO la photo)
Terrasse vue de côté: balustrade (bas), sol balcon, conduit aluminium, pot de fleur renversé sur herbe et gravier
Eloignement pot de 10cm du conduit - Eclairage meilleur, seulement 1 blocage mise au point sur 30 photos prises sur branche U au plus près du conduit
Par rapport au mode "Vue par vue", le mode "Continu" (2 images par seconde) est plus sensible à l'éclairage; si le réglage ne peut se faire, la photo n'est pas prise ou la photo est prise mais est floue.
Ce mode peut être intéressant car il permet de programmer le doublement de la vitesse de déplacement de l'hélicoptère et donc une meilleure tenue du vecteur vitesse sol (GPS) sur axe s'il y a du vent.
Le logiciel "PhotoScan" est gourmand en mémoire. Pour éviter l'indication "Pas assez de RAM", le nombre total de photos prises doit rester inférieur à 100 avec un PC portable 64 bits, une RAM de 16GO et un processeur Intel(R) Core(TM) i7-4710HQ avec CPU à 2.50Ghz.
L'extrapolation de la hauteur de validation 2.60m à 260m AGL, soit un facteur 100, indique la possibilité de reconstruire une bande de terrain 3D de 260m de long sur 130m de large en seulement 30 photos verticales prises sur deux axes séparés de 30m avec une focale de 50mm pour une échelle 1/5000; le pot de fleur devient un réservoir de 19m de haut et de ∅ 21m.
312 - Mode "P" (programme): opérateur laisse au programme du Nikon le soin le choix d'une vitesse et d'une ouverture pour une exposition optimale.

Paris 12/03/16 - 15h48 (soleil et ombre portée) - Focale 50mm, 800 ISO, Mode vue par vue, Auto Focus: zône dynamique, Image: qualité JPEG Normale & taille Large - 24 photos prises (6.4MO la photo)
Deux bandes de 10 photos (rectangles bleus), prises sur hippodrome en U à cadence 1 seconde à 2.30m de haut - U entoure la verticale du pot de ∅21cm
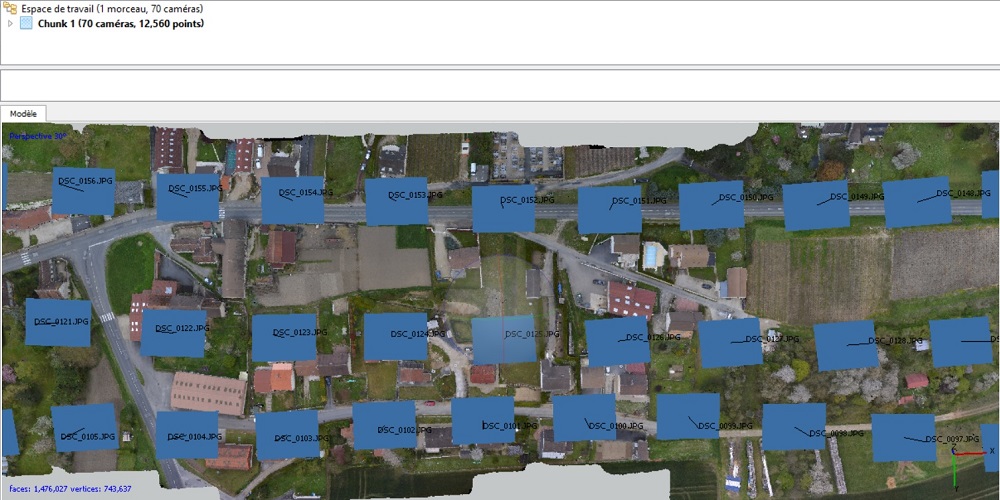
Azy 28/04/16 - 13h00 (ciel nuageux, rares averses) - Focale 24mm - GSD 2cm/pixel mesuré sur couvercles poubelles caractéristiques
3 bandes de 300m espacées de 80m - Recouvrements: longitudinal 80%; latéral 60%
axes bandes identifiables au sol par points caractéristiques repérés sur GOOGLE EARTH avec simulation navigation en vue oblique
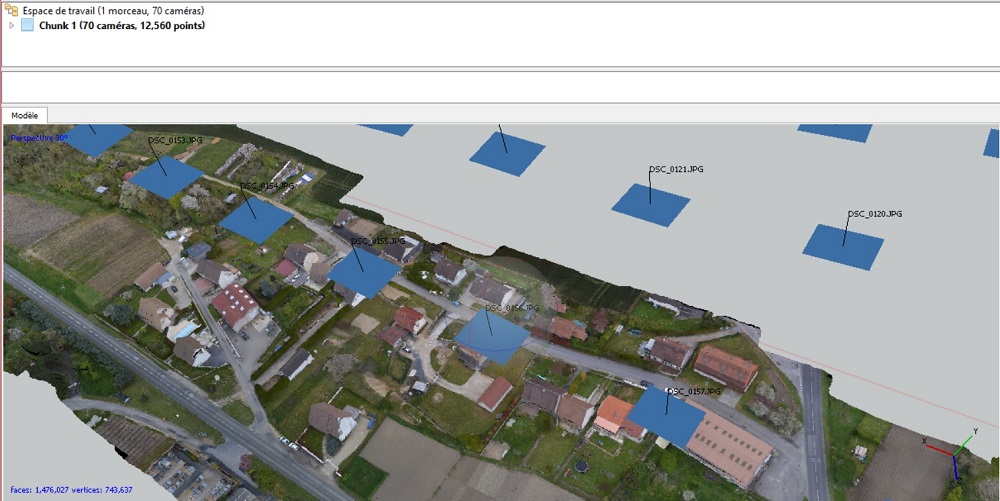
Azy 28/04/16 - 13h00 (ciel nuageux, rares averses) - Focale 24mm
Vue sous un angle différent
313 - Paramètres photogrammétrie
Voir cours-fad-public.ensg.eu
- "Désolé cette activité n'est pas visible actuellement. Continuer."
- Attendre quelques secondes arrivée écran GEOligne .../A PROPOS DE ... Auteur Laure Chandelier
- Choisir par exemple: "Cours visualisable à l'écran"
32 - En l'air
Le POD HOP WIC est à utiliser de préférence sur un aéronef à voilure tournante (hélicoptère ou autogire) beaucoup moins sensible aux turbulences qu'une voilure fixe.
Les photos verticales sont faites en mode S avec Nikon orienté "Paysage" dans le pod (axe longitudinal déplacement = petit côté CMOS 15.4mm); télécommande Hähnel cadence 1 photo/seconde sur x intervalles:
- focale 18, 24, 35 ou 50mm fonction du GSD souhaité et de la hauteur AGL possible;
- vitesse sol GPS fonction du porteur utilisé (entre 60 et 100MPH si Kompress);
- image: qualité "Fine"; taille "Large" (1 photo = 13MO)
Un système de guidage DGPS type WAAS (EGNOS en Europe) est utilisé; l'antenne doit être déportée et placée à l'avant de la console instruments contre le plexi du cockpit pour une réception satellite optimum (12 GPS, 2 EGNOS).
La précision +/-2 à 3m de ce type de guidage est adaptée au besoin du pilote qui doit "rester" sur des axes séparés latéralement de 20 à 90m; la précision centimétrique du RTK utilisé dans l'agriculture n'est pas ici nécessaire.
Le pilote fait sa "PrépaMis. hippodrome" sur Google Earth; il charge l'hippodrome à suivre sur un des deux types de récepteur DGPS utilisant soit une Barre avec leds de guidage, soit un Ecran avec carte vectorisée.
La partie visualisation - Barre avec leds de guidage, Ecran avec carte vectorisée - est à placer sur le haut de la console instruments afin de permettre au pilote une vision simultanée des repères extérieurs sol mémorisés et des données graphiques affichées (allumage de leds, déplacement plot sur carte vectorisée).
a) Barre avec leds de guidage: il voit
--- à l'extérieur, au travers du cockpit, les points de repères mémorisés sur l'itinéraire au sol;
--- à l'intérieur, sur AGNAV Guia-Lite, les leds de guidage devant le plexi du cockpit;
b) Ecran avec carte vectorisée: il voit
--- à l'extérieur, au travers du cockpit, les points de repères mémorisés sur l'itinéraire au sol;
--- à l'intérieur, sur Garmin GPSmap 96C ou Garmin AERA 660 utilisé en mode EGNOS (European Geostationary Overlay Service), le plot de guidage se déplaçant sur l'itinéraire à l'échelle ad-hoc.
Avec le choix d'une bonne échelle ad-hoc fonction de la vitesse sol, la vision graphique du plot se déplaçant sur la carte vectorisée est plus intuitive à utiliser au niveau des commandes de pilotage que la barre de guidage.
33 - Satellites géostationnaires EGNOS au-dessus de l'équateur (PRN 120, 123, 136 ou ID 33, 36, 49)
Ces 3 satellites appartiennent à la catégorie WAAS (Wide Area Augmented System; ID NMEA de 33 à 64 apparaîssant sur le graphique circulaire de réception GPS très proche du cercle extérieur car bas sur l'horizon).
Sur les 3 il y en a toujours 2 de disponibles. Comme ils gravitent à l'équateur, plus le récepteur (France) est en hauteur, mieux il peut les recevoir; dans certains cas, un récepteur au sol pourra ne pas les recevoir.
La précision - par exemple, 9 à 12 ft (3 à 4m) - est indiquée en permanence avec LAT LON; donc s'il n'y a pas d'enregistrement possible pour faire une moyenne, lors d'un relevé de position Line Of Interest (WP drone), choisir LAT LON à la meilleure précision indiquée.
Exemple - Vendredi 25/05/2018: LAT LON coin pelouse du Jardin des Plantes identifié sur image satellite Google Earth (GE) du 07/08/2017
matin - 11h
Point 8 - Google Earth - LAT 48.842 585 LON 2.358 299
Point 8 - Garmin 96C -- LAT 48.842 580 LON 2.358 340 Précision position +- 9ft avec ID 36 (meilleur relevé)
Différence---------------- LAT 00.000 005 LON 0.000 041
après-midi - 18h
Point 8 - Google Earth - LAT 48.842 585 LON 2.358 299
Point 8 - Garmin 96C -- LAT 48.842 530 LON 2.358 320 Précision position +- 9ft avec ID 33 & 49 (meilleur relevé)
Différence---------------- LAT 00.000 055 LON 0.000 021
En supposant bon à +- 9ft le point relevé DGPS Garmin GPSmap96C (ou GPS & GLONASS drone), la localisation LAT LON directement sur image satellite GE zoomée peut donc être erronée de LAT 00.000 005 LON 0.000 041 (ou de LAT 00.000 055 LON 0.000 021) ce qui explique les décentrements observés parfois lors d'un vol drone pour une reconstruction 3D en mode "Point Of Interest" (vol circulaire autour d'une statue) par "Tap" (sur statue figurant sur image satellite) après une préparation de mission "DJI Ground Station PRO" utilisant des images satellites sur le monde entier.
D'où l'intérêt, pour les drones en particulier, de l'arrivée de GALILEO 3 fois plus précis que GPS ou GLONASS qui devrait être opérationnel en 2020.
a) Prévisions état
------------------------------- Satellites EGNOS ----------------------------------
Date lancement ----- Nom -------------- PRN --- GPS --- Position orbite
Septembre 1996 ---- Inmarsat 3F2 -- 120 ----- 33 -------- 15.5° W
Mars 2014 ------------ ASTRA 5B ----- 123 ----- 36 -------- 31.5° E
Février 1998 --------- Inmarsat 4 F2 - 126 ----- 39 -------- 25° E
Juillet 2012 ----------- ASTRA 4B ----- 136 ----- 49 -------- 5° E
L'état des satellites (Safety Of Life SOL, Test mode) PRN 120, 123, 136 est donné chaque jour par EGNOS USER SUPPORT.
b) Observation (Garmin "aéronautique" GPSmap96C avec antenne déportée à hauteur AGL sur porteur - piéton (ant. dans bonnet), voilure tournante (ant. avant cockpit), voilure fixe (idem) - à vitesse sol KT et au cap N, S, E, O)
20/12/2016 14h20 ----- J. des P. "Vertebrata" --- Piéton ---- 0 ----------------- N,S,E,O --- 1.80m ---------- 120, 136 --- 33, 49 ------ 3, 4 ----------- +/- 6ft -------- 2 --------------------------------
21/12/2016 12h20 ----- J. des P. "Vertebrata" --- Piéton ---- 0 ----------------- N,S,E,O --- 1.80m ---------- 136 ---------- 49 ----------- 4 -------------- +/- 6ft -------- 1 -------------------------------- Si antenne déportée est débranchée
22/12/2016 12h05 ----- J. des P. "Vertebrata" --- Piéton ---- 0 ----------------- N,S,E,O --- 1.80m ---------- 120, 136 --- 33, 49 ------ 4, 4 ----------- +/- 5ft -------- 2 -------------------------------- Précision bonne 5, 6ft 5mn après mise sur ON ?
02/03/2017 11h00 ----- Azy/Marne - Hélico KOMPRESS --- 65 ----------------- E -------- 1700ft ---------- 120, 136 --- 33, 49 ------ 4, 4 ----------- +/- 12ft -------- 2 -------------------------------- DGPS, branches en U espacées 90m; trop de vent pour Vsol stable à Vs contante
34 - Dépouiilement saisie 3D "AZY UR MARNE" avec HOP WIC sur Sketchfab
- en 2017 - Surface 3D avec Agisoft Metashape
- en 2026 - Jumeau (Agisoft Metashape suivi de Rhinoceros pour découpage surface 4 côtés et fermeture base)
.
35 - Sortie imprimante 3D

ULM hélicoptère "Kompress" - Prise de vues verticales - Azy sur Marne
Plan en relief échelle 1/6000 (ou 1/3000) prêt à être sorti pour impression 3D
4 - BUDGET TTC
HOP = 1558€ dont 1200€ pour le prototypage en plastique de la plateforme autostabilisée
- prototype plateforme cardan (1 exemplaire par Sculpteo): 1200€
--------------------------------------- chapeau blanc (750€); pour l'instant pas trouvé en grande surface une cuvette ou un seau en plastique de dimensions ad-hoc (Ht 15cm, ∅ 21cm); projet de se servir du chapeau comme moule, pour réaliser le même en fibre de verre plus léger (poids actuel 650g en 5mm d'épaisseur) et moins cher,
--------------------------------------- plateforme: 2 fourches rouges + collerette blanche + cadre vert en plastique poli (450€)
- vis, boulons et rondelles en acier ou plastique (quincaillerie): 45€
- plaque de portage en aluminium (John Deer): 55€
- 3 cônes de signalisation (L=l=28cm;H=50cm - Leroy Merlin) coupés à H 17cm (focale 50mm), H 20cm (focale 105mm) et H 25cm (focale 120mm) : 36€
Ce cône très bas coût, produit industriellement, constitue la base fonctionnelle de protection aérodynamique et de support de la plateforme autostabilisée du Nikon; il représente la moitié du volume de HOP, l'autre moitié étant la plateforme avec son chapeau; entre les deux la plaque de portage fixée sur 2 ponts sous le moteur
- 4 sandows: 12€
- 3 hublots en verre (diamètres 142mm, 130mm, 116mm; épaisseur 4mm) avec bords polis (Verre & Miroirs - www.verresetmiroirs.com) : 210€ (si récupération à atelier de Sèvres)
WIC = 513€
- intervallomètre Hähnel Giga T Pro II (Photo St-Charles 75015 - www.photosaintcharles.com): 99€
- dongle WiFi Nikon WU-1a (FNAC Montparnasse): 55€
- dongle WiFi CamRanger (La Boutique Photo Nikon 75017): 359€
NIKON D3200 = 570€
- objectif Nikkor 18-105mm f/3.5-5.6G ED VR (Photo vidéo Alexandre 75005): 570€
____________________
PS: Merci de donner remarques, idées ou le bonjour encliquant ci-dessous:
christian.degastines@orange.fr
Retour à SOMMAIRE