
CHAGAR - Groupe Photogrammétrie - Prototype de pod optique pour ULM et avion
Mis à jour le 29/07/2023
La photographie réunit pendant les vacances d'été le groupe CHAGAR - CHristian (grand-père pilote) et deux de ses petits-fils Alexandre (élève grande école), Guillaume (élève classe préparatoire) - dans le même avion DO 27 survolant, porte de larguage para ouverte, l'ARcoat (Bretagne de l'intérieur).
Il utilise, sur un PC ASUS ROG (intel CORE i7 8th gen, 64bits, SSD 237 MO, DD 931 GO), le logiciel Metashape pour la reconstruction 3D faite à partir de photos prises avec des Appareils Photos Numériques Nikon, Canon, Sony; il publie les résultats de ses travaux sur le site 3D Sketchfab, sur un site personnel et sur des comptes Facebook ou Instagram.
En attendant que iTown et Street View mettent à sa disposition en 3D certains lieux qu'il aime bien, le groupe s'est fixé l'objectif de reconstruire en 3D et en une seule prise de vues aériennes par photogrammétrie, à deux échelles différentes se complétant, un village centré sur un château ou un clocher ou un monument pour la mémoire des hommes et des lieux.
Si les possibilités d'essais air le permettent, il est prévu de réaliser un prototype de pod optique ULM-avion associant une barre porteuse 2 ou 1 APN (capteur APS-C, intervallomètre) à une barre de guidage DGPS couplé EGNOS pour prendre
- soit des photos obliques sur Point Of Interest;
- soit des photos verticales sur axes parallèles,
afin de reconstruire soit deux modèles 3D à des échelle différentes complémentaires si photos obliques, soit un seul modèle 3D si photos verticales.
En l'absence de boule optronique gyrostabilisée placée à l'avant ou sous l'aéronef, deux conditions sont nécessaires pour obtenir de bons résultats:
- éviter les masquages de haubans et les distorsions de bulle de cockpit c'est à dire qu'il faut placer les axes optiques des APN à l'air libre donc utiliser comme aéronef
---- soit un ULM autogire en tandem, par exemple le MTO de Autogyro,
---- soit un AVION de largage para sans haubans, porte ouverte, par exemple le DO27 de Dornier,
- avoir une prise de vues stable c'est à dire qu'il faut utiliser un autogire dont le rotor découpe en rondelles les remous si la couche d'air est remuante; seul problème il ne faut pas qu'il fasse trop froid pour l'équipage !
Le binôme pilote-photographe utilise conjointement les techniques suivantes:
- équipement DGPS EGNOS pour le pilote (navigation AVIATION "Garmin GPSmap96C" ou guidage AGRICULTURE de précision "TeeJet Matrix 430") sur l'hippodrome de prise de vues (obliques sur POI; verticales sur bandes parallèles);
- liaison radio FSK 2.4 Ghz entre photographe et intervallomètre externe sur APN; 2 récepteurs 2.4Ghz sont sur le même canal (1 à 56) que l'émetteur 2.4Ghz qui leur envoie le même intervalle 2 secondes et le même nombre de photos à prendre.
Le pod a 2 versions:
n°1 - vs "photos obliques": barre porteuse prévue pour 2 APN avec capteur CMOS APS-C identiques (2 Sony Alpha 6000 avec récepteurs intervallomètres 2.4Ghz "JJC"); elle est tenue à deux mains (poids charge 1.8kg) et le photographe utilise le viseur optique de l'APN dont la focale est la plus grande;
- essais finaux sur ULM autogire "Autogyro MTO" ou avion "DO27" porte ouverte;
n°2 - vs "photos verticales":
- essais finaux sur ULM:
--- 3 axes ou autogire (version côte à côte): plaque support fixée au-dessus fenêtre du plancher, prévue pour un APN "Nikon D750" (intervallomètre interne; zoom à 35mm) ou un "Sony A 6000" (intervallomètre externe "JJC"; optique E 30mm); pilote et photographe peuvent agir en visualisant simultanément la verticale; le photographe déclenche l'intervallomètre interne du Nikon D750 en appuyant sur le bouton "OK" de la face arrière un peu avant le début de bande repéré par la fenêtre au plancher et sur la barre de guidage DGPS EGNOS du pilote;
--- hélico CH7 Kompress: pod APN fixé au Centre De Gravité sous moteur via 4 bras sur supports horizontaux du moteur, prévu pour "Sony A6000" (intervallomètre externe Hâhnel avec commande 2.4Ghz; focale fixe 30mm); le photographe déclenche l'intervallomètre externe "JJC" en pod à partir de l'émetteur "JJC" qu'il a en main dans le cockpit en début de bande repéré sur le système de guidage DGPS EGNOS utilisé (Garmin, Teejet).
1 - Pod optique vs "photos obliques"

Août 2021 - CHAGAR dans DO 27 porte ouverte au-dessus du Morbihan
L'idée directrice pour le futur est d'utiliser
- une barre de guidage DGPS pour le pilote,
- un smartphone fixé sur un cadre piloté manuellement par le photographe qui vise en continu le Point Of Interest afin de conserver l'axe optique de l'appareil photo en pod sur ce POI via un mécanisme ad hoc à réaliser (capteurs de rotation, moteurs électriques).
Dès maintenant, une maquette Proof Of Concept utilisable
- par le pilote via un guidage DGPS (vs "avion" Garmin, vs "agricole" TeeJet),
- par le photographe via une barre porteuse 2 APN et un même canal de commande radio pour les 2 intervallomètres,
permet de valider le concept de prise de vues simultanées avec 2 focales différentes pour avoir 2 niveaux de détails sur le même objectif sol.
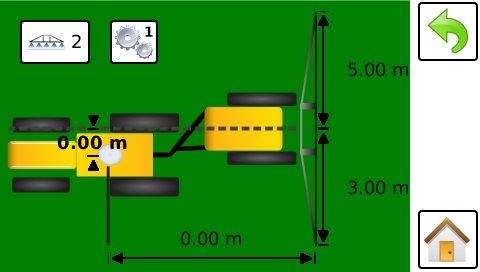
La barre porteuse 2 APN est une barre en bois de 33cm de long, de section rectangulaire (Hauteur=3cm; Largeur=2cm) terminée par 2 poignées. Elle peut accueillir côte à côte 2 APN sur 2 pas de vis 1/4 pouce portés par 2 supports "Takeway Ranger R2".
Un émetteur intervallomètre externe "JJC Gloxy" dans une poche de poitrine de la combinaison du photographe commande par radio 2.4Ghz les récepteurs intervallomètres externes placés sur les 2 APN.
Il y a deux contraintes:
- vérifier régulièrement le parallélisme des axes optiques des APN en regardant celui des bords des APN avec la barre porteuse qui sert de référence;
- choisir Focales, Rayon hippodrome, Recouvrement (= ou > à 60%) entre les photos pour que les 2 APN puissent travailler en prise de vues à intervalles (2 s pour ne pas avoir trop de photos à traiter) avec les mêmes paramètres de vol (Vitesse, Hauteur sol).
Les poignées aux extrémités permettent de conserver le pointage sur le Point Of Interest en utilisant le viseur optique de l'APN haut dont la focale est la plus grande (70mm ou 100mm).

19/10/2021 - POC - "Barre porteuse 2 APN" (33 cm; 1.8kg) avec 2 supports "Takeway R2" - Tenir à main D afin de viser en utilisant le zoom du Sony Haut
1 Sony A 6000 (APS-C; Zoom 18-200mm mis à 70 ou 100mm) en haut et, tête en bas, 1 Sony A 6000 (APS-C; F 30mm fixe; option rotation image 2x90°)
Émetteur 2.4Ghz intervallomètre "JJC" (en bas à G.) directement branché sur Sony A 6000 du haut (zoom à 70 ou 100mm)
Récepteur 2.4Ghz intervallomètre "JJC" sur viseur Sony tête en bas
Les essais ont été faits en vol sur un hippodrome R 400m avec un ULM autogire "Autogyro" type MTO.
Trois étapes sont nécessaires pour rendre la "trace" R400-R800 autour POI visible à plusieurs échelles - 500ft, 300ft, 200ft, 120ft, 80ft, 50ft - sur DGPS Garmin:
a) gratuiciel Google Earth: Menu "Ajouter", sous-menu "Trajet"; créer cercle R 400m puis R 800m par une succession de clics; enregistrer au format KML;

Ecran PC Google Earth - Cercles R 400m et R 800m en orange créés sur Google Earth
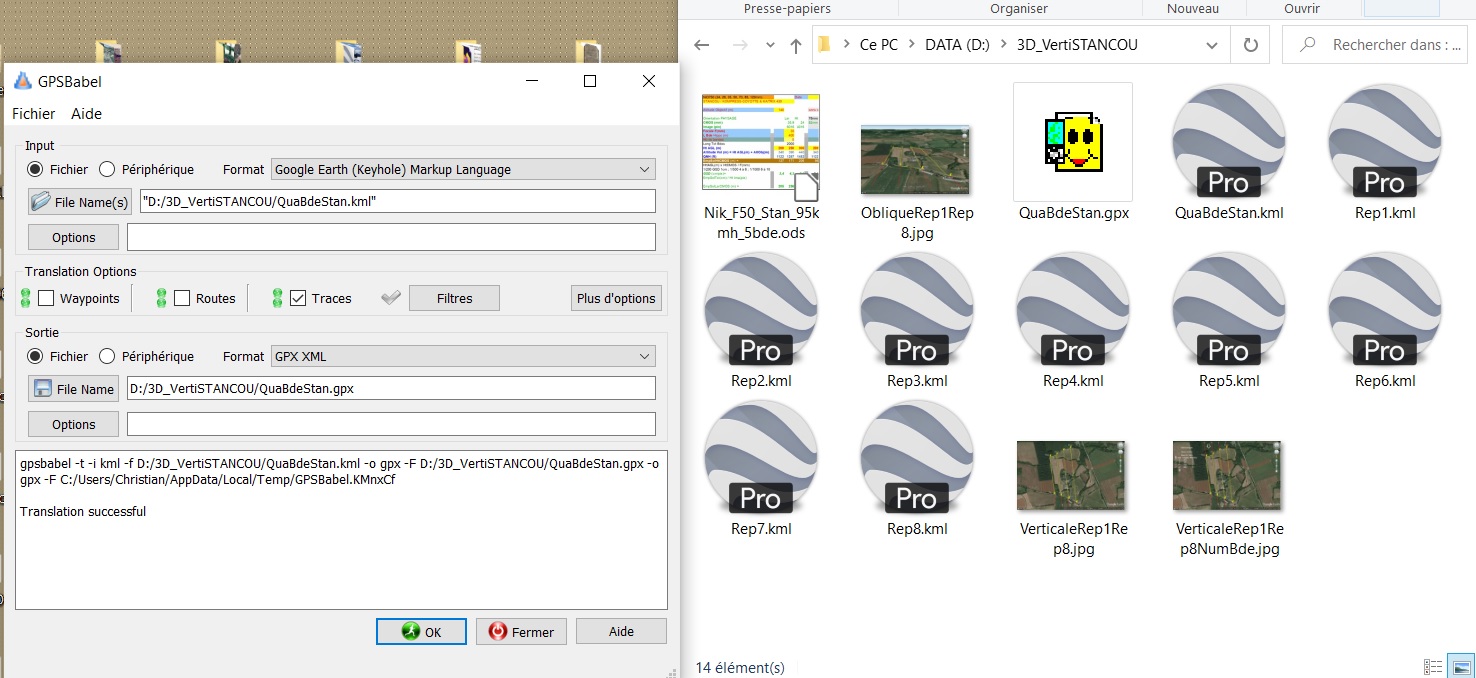
INPUT = Fichier format "Google Earth(Keyhole) Markup Language"; cliquer 2 fois "File Name" pour aller récupérer fichier dans le dossier ad hoc; affichage "D:/3D_VertiObliSTANCOU/Chau400800.kml"; cocher "Traces";
SORTIE: copier coller dans "File Name": D:/3D_VertiObliSTANCOU/Chau400800.gpx; faire OK; le fichier "Chau400800.gpx" est disponible ainsi que les 2 traces correspondantes sur Google Maps pour vérification:
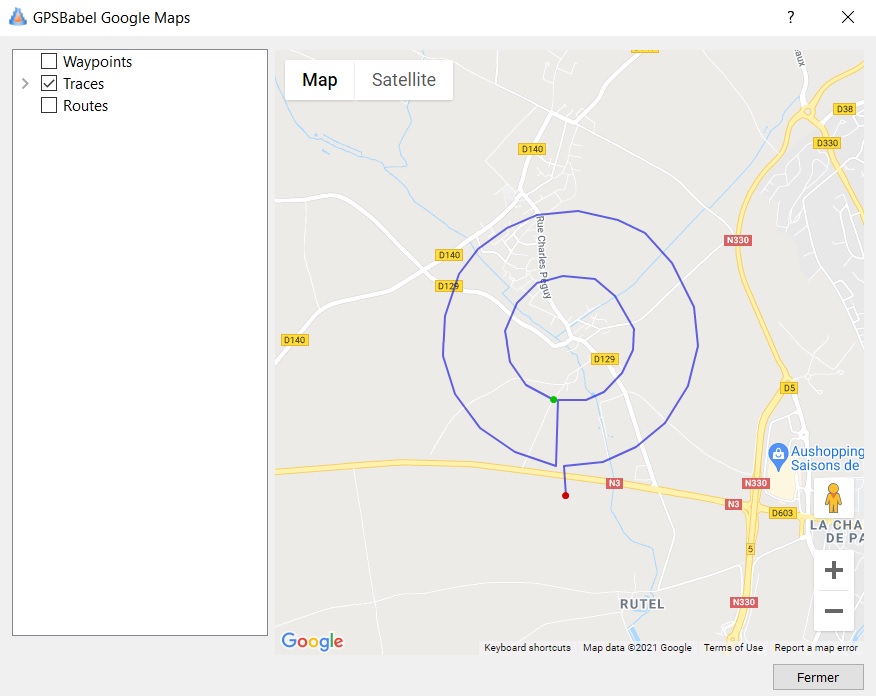
Ecran PC GPS Babel - Passage format KML au format GPX et affichage sur Google Maps
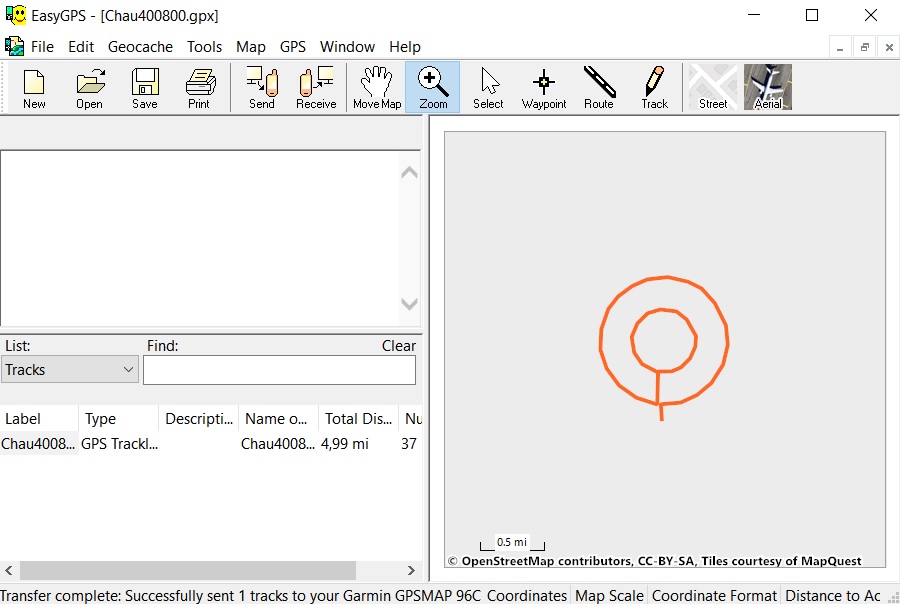
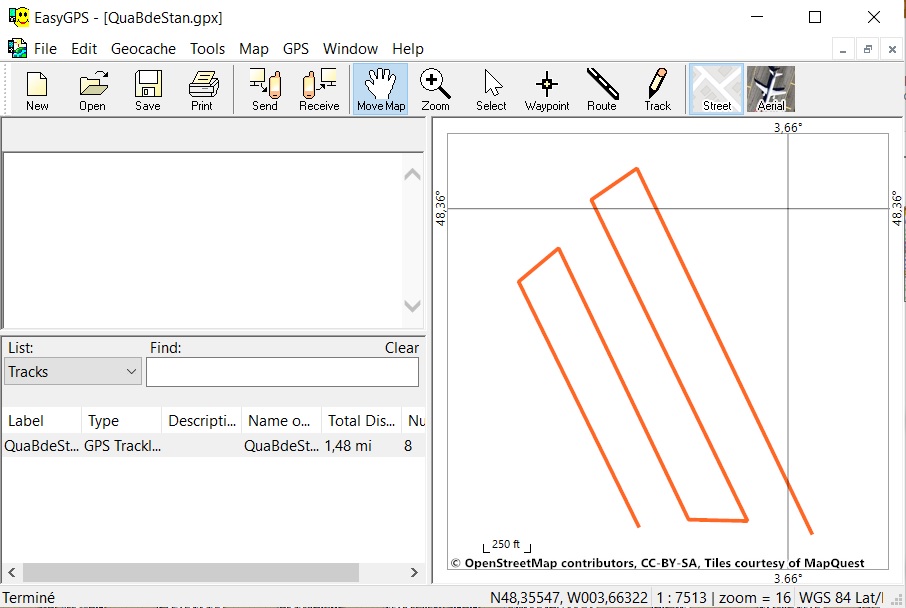
Ecran PC EASYgps - Transfert 2 hippodromes R 400m et R 800m en orange réussi sur Garmin DGPS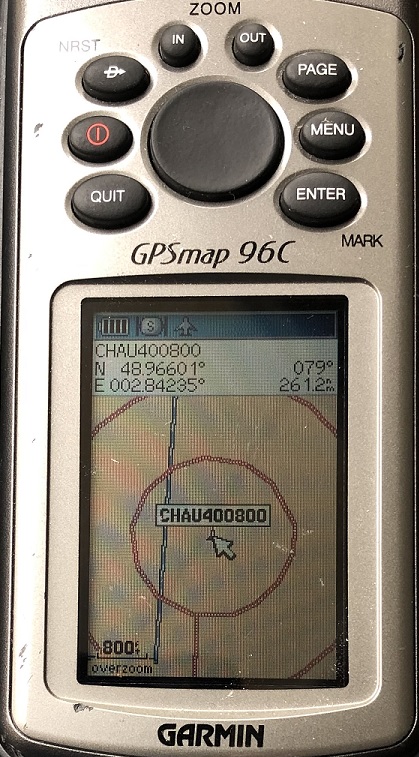
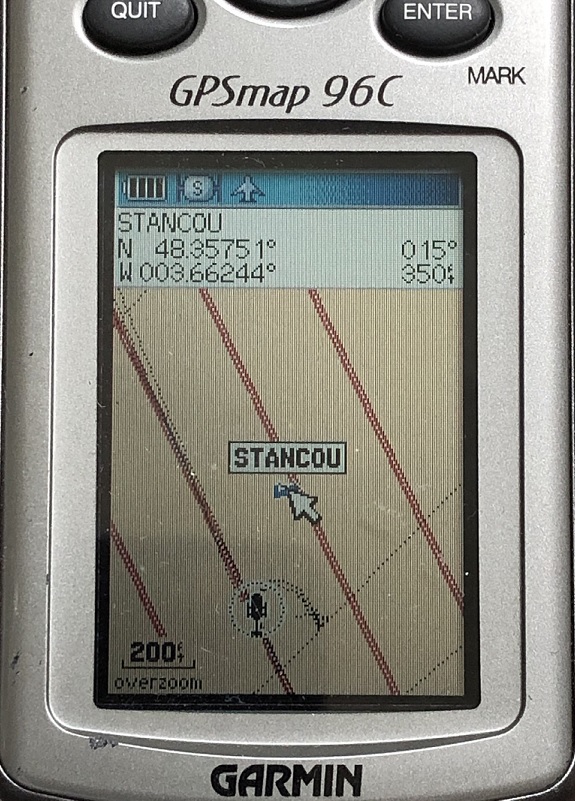
Ecran Garmin DGPS - Echelle (en bas à G) 800ft - 2 hippodromes R 400m et R 800m
Pilote doit prendre Ech 300ft ou 120ft en faisant ZOOM IN
pour se laisser guider par sa position à G ou à D des cercles de couleur orange afin de rester sur son cercle
Les côtés des carrés des surfaces 3D reconstruites sans trous à deux échelles différentes devraient être approximativement égaux
- à Emprise Sol Totale/2 pour le village avec F 30mm,
- à Emprise Sol Totale/4 pour l'église avec F 70mm (R 400m) ou 100mm (R 800m).
Le photographe prend
- le POI sur l'église au centre du village;
- les focales
---------- 30mm en bas: Sony A 6000 portant récepteur intervallomètre externe "JJC" (intervalle 2s);
---------- 70mm ou 100mm en haut: Sony A 6000 directement relié à émetteur intervallomètre externe "JJC" (intervalle 2s) sur le même canal radio que le récepteur du Sony 35mm tête en bas.
2 - Pods optiques vs "photos verticales"
L'arrivée de récepteurs bas-coût GPS-GLONASS-EGNOS sur le marché de l'agriculture de précision par exemple le Matrix 430 (1000 €) compatible avec le DGPS aviation de Garmin GPSmap96C permet, dans un premier temps pour une besoin de précision de navigation de l'ordre de 10m, de se passer du GPS différentiel avec RTK trop onéreux.
21 - Hélico ULM
Le Hung Optical Pod WIreless Command - HOP-WIC - est conçu pour être installé sous le moteur d'un hélico ULM ou derrière le moteur d'un autogire Xenon.

2015-2016 Champ Cadet - HELI LIGHT ULM - HOP WIC sur hélico ULM CH7 Kompress
Planche de vol pour cuisse gauche du photographe avec GPS Garmin et déclencheur WiFi posé hauteur patin gauche

Azy 28/04/16 - 13h00 (ciel nuageux, rares averses) - Focale 24mm - GSD 2cm/pixel mesuré sur couvercles poubelles caractéristiques
3 bandes de 300m espacées de 80m - Recouvrements: longitudinal 80%; latéral 60%
axes bandes identifiables au sol par points caractéristiques repérés sur GOOGLE EARTH avec simulation navigation en vue oblique

ULM hélicoptère "Kompress" - Prise de vues verticales - Azy sur Marne
Plan en relief échelle 1/6000 (ou 1/3000) prêt à être sorti pour impression 3D
22 - ULM 3 axes type Coyote

13 Novembre 2021 - Le Stancou - AERO-PLASS - Coyote 65 CV avec Rotax 582 (plage vitesse travail 90 à 100km/h)
Sony A 6400 posé sur plaque support en Dibond montée sur amortisseurs et réglée pour que l'axe optique soit vertical en vol
Une fois en vol et l'intervallomètre réglé sur la télécommande "JJC", le photographe peut poser APN et plaque support en Dibond (plaque de polyéthylène en sandwich entre deux plaques aluminium) sur 3 tiges fixées sur la cellule du Coyote au dessus de la trappe de visée verticale; cela évite les projections de terre sur l'objectif.

Sony A 6400 calé sur des "carréponges" Spontex posés sur plaque en Dibond afin d'amortir les vibrations
Télécommande "JJC" tenue à la main (mise en oeuvre très facile d'une main) et reliée directement au Sony A 6400 par la prise micro-USB
En vol le sol est visible par la fenêtre au plancher et par l'image sur le dos de l'APN positionné en mode "portrait" / axe de l'ULM

Coyote - Vue de dessous - Fenêtre sur plancher permettant de voir à la verticale le début et la fin de bande photo
Partie photographe est ocultable pour éviter les courants d'air hors utilisation pour photos verticales

Le Stancou - 06/11/2021 - Coyote vue de l'intérieur - Plaquette occultation enlevée - LP taille plexiglas fenêtre pour que focale fixe 30mm Sony A 6400 passe sans le toucher
3 axes avec amortisseurs noirs visibles (2 sur colliers fixés sur tubes noirs structure, 1 sur montant central jaune trappe) pour recevoir plaque Dibond avec Sony A6400
La plaque Dibond avec Sony A 6400 est posée après le décollage pour éviter les projections de terre sur l'objectif
Les essais en vol montrent que le zoom 18-200 réglé à 30mm tourne tout seul; pour éviter blocage par scotch
une focale fixe de 30mm le remplace avec Sony orienté en mode Portrait (axe déplacement // largeur 23.5mm du capteur APS-C)
A 250m sol, Recouvrements Haut 72% Latéral 60% donnent avec capteur CMOS APS-C une Base Large 52m et une Vi 100km/h avec intervalle photo 2 secondes
Sur le TeeJet Matrix 430, la largeur totale de la rampe d'épandage est réglée à Base Large 52m (2 tronçons 26m)
Le prototype BLOP-DIC avec barre de guidage sur axe par Matrix 430 - en secours, Garmin GPSmap 96C avec zoom "IN" réglé pour voir la totalité des 4 ou 5 bandes à parcourir dans le même sens - est en cours d'essais en vol (6 et 12 Novembre) avec 2 consignes "pilote" pour faciliter le pilotage et le dépouillement 3D avec METASHAPE:
- Consigne 1: la bande AB (52m de large pour F 30mm et 250m AGL à 100km/h) est parcourue face au vent (estimé entre 0 et 15km/h) à une vitesse Vi indiquée anémomètre Coyote de 100km/h; Vi maintenue à 100km/h permet d'avoir un recouvrement photos dans le sens du vol compris entre
--- 72% (Vent nul)
--- 76% (Vent de face 15km/h)
--- 68% (Vente dans le dos 15km/h)
à l'altidude de 250m sol
Le nombre de photos à faire dans la bande varie de 7 à 10 photos; il sera pris égal à 20 pour se garder une marge d'erreur à chaque bout de bande;
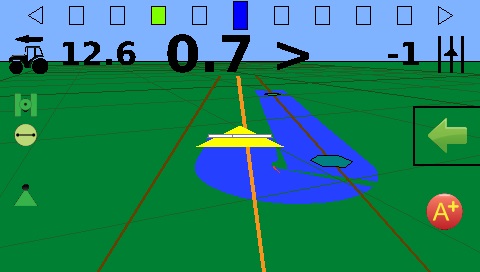
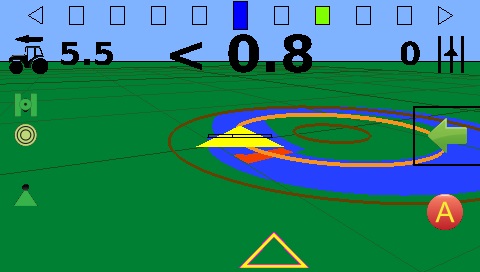
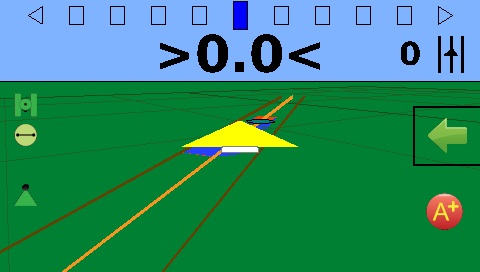
"TeeJet Matrix 430" - "Screen shot" écran trace orange "Straight AB guidance"
Mode DGPS = satellite vert clair en haut à G
Pilote est en début bande -1, colorée en bleu, n° en Ht et à D; il commence sa 2e bande;
Bande n°0 avec 2 hexagones verts représentant A et B créés en appuyant sur le bouton correspondant en bas et à D

Sony A6400 - Suspension cardan 2 axes - Roulis en rouge et Tangage en vert
Fixation Sony en position "paysage" sur plaque tangage (vert) par 2 élastiques avec 2 amortisseurs en "carréponge" jaune posés sur haut et bas de l'écran LCD (référence "horizontale")
Axe roulis (rouge) cardan porté par collerette blanche posée sur plaque Dibond
Fixation collerette via 3 pattes de calage reliées aux 3 tiges verticales fixées sur la cellule du Coyote pour positionner la plaque Dibond
Pour le guidage GPS sur l'axe de la bande, comme la prise de vues se fait à plus de 200m sol, les satellites GPS, GLONAS, EGNOS sont reçus sans problèmes par le récepteur car non masqués par les arbres comme quand il est au sol.
Le vol d'essai du 13/11/21 s'est déroulé entre 3 grains à environ 3km du terrain donnant une lumière trés belle. La bande -1 a été loupée par suite de non suivi des consignes données par la barre de guidage travaillant en DGPS.
Le résultat global (photos obliques sur la Chapelle de St-Michel, photos verticales sur Le Stancou) est correct; il montre que le Matrix 430 en mode DGPS EGNOS donne une bonne indication de guidage au pilote par des < ou > afin de rester soit sur un hippodrome circulaire soit sur des axes.
23 - Modification logicielle Matrix 430
Une amélioration du logiciel Matrix 430 serait à prévoir par TeeJet pour s'ouvrir le marché des propriétaires d'ULM: donner le choix à l'utilisateur d'introduire les coordonnées Lat/Lon des points A et B
- soit en "roulant" dessus en tracteur, si on est en mode SOL et agriculteur;
- soit directement au clavier du Matrix après lecture sur Google Earth ou sur GPS, si on est en mode AIR et pilote épandage. Dans le cas du "Circle pivot guidance", AB serait le diamètre du cercle à générer automatiquement.
3 - Barre de guidage DGPS TeeJet Matrix 430

TeeJet - "MATRIX 430" / User manual / Guidance bar" - Page 4
"Ag Nav OLED Transparent Lightbar"
31 - Essais au sol pour prise en main du GPS avant utilisation en vol

"TeeJet Matrix 430" - 05/09/21 - Installation dans PEUGEOT 208 sur ventouse mise centre pare-brise - Cable 12v sur allume-cigare - Antenne sur toit
311 - Essais en véhicule PEUGEOT 208
- TeeJet Matrix 430 installé sur pare-brise, alimenté par prise 12v allume-cigare, antenne embase magnétique sur toit

EGNOS - 02/10/21 - Prévisions possibles à 10 jours pour PRN 136
"TeeJet Matrix 430" - 21/09/21 - Parking de l'avenue des Championnats du monde (Plouay)
"Screen shot" écran trace orange "Straight AB guidance"
Mode DGPS = satellite vert clair en haut à G - Appui sur logo satellite indique 10 comme nombre de GPS et 36 comme n° satellite EGNOS
conducteur "traite" bande -1, colorée en bleu, n° en Ht et à D, sa 2e bande
bande n°0 avec 2 hexagones verts représentant A et B créés en appuyant sur le bouton correspondant en bas et à D
n° - à G et + à D
bouton A+ permet de se recaler sur la bande en cours si saut brusque (changement de constellation satellites)
traitement (coloration en bleu) = appui sur triangle jaune de position = logo petit rond noir au-dessus triangle vert clair affiché en bas à G
CR traitement au format PDF - Quadrillage au pas de 10m - Largeur totale rampe programmée à 8m (5 + 3) dans Matrix
CR traitement sur GOOGLE EARTH
"TeeJet Matrix 430" - 21/09/21 - Parking de la maison des associations (St-Yves)
"Screen shot" écran traces en orange du "Circle pivot guidance" AB = 25m (approximativement)
Rectangles en noir sur triangle jaune de position = Vue des tronçons 3m et 5m de la rampe de 8m = un des 5 "profils" mémorisés
Parking de la maison des associations (St-Yves) - CR traitement au format PDF - Quadrillage au pas de 10m
Cercle de diamètre AB = 25m de couleur orange
Largeur épandage en bleu = 8m de la rampe programmée dans Matrix comme "profil" n°1
CR traitement sur GOOGLE EARTH
312 - Logos "Recopie d'écran" et "Rapport"
Le logo "Recopie d'écran" (= Appareil Photo Numérique vue de face) permet des recopies d'écran: l'appui sur ce logo crée un fichier "shot00x.png" sur le TeeJet et sur une clé USB placée sur le côté droit.
L'appui sur le logo "Rapport" (= Tiroir de classeurs) permet d'obtenir un CR du travail effectué - temps passé, nb d'ha traité, nb d'ha total délimité - sous forme graphique sur Google Earth en KML (voir ci-dessus) et sur une fiche avec quadrillage au pas de 10m, 100m, 1000m (voir valeur du pas 10m ci-dessus) en PDF.
313 - Mémoire
- Mémoire interne pour conserver le choix de la configuration GNSS (GPS, GPS+SBAS, GLONASS) et le n° du profil machine (5 profils possibles);
- Clé USB à mettre systématiquement sur le côté D pour tranférer en fin de travail le CR "Report" du travail effectué présent en mémoire interne (clic sur "ALL"); une fois transfert effectué cliquer sur logo "poubelle" pour remettre à 0 le compteur des lignes ou cercles AB en mettant l'original à la poubelle.
32 - Essais guidage en vol sur ULM
321 - Hippodrome en cercle pour photos obliques avec ULM 3 axes Virus - Chapelle de St-Michel

Google Earth - Tracé hippodrome circulaire R 350m (en rouge) photos obliques - 1er point "Am" pour top verticale Matrix, Pt intermédiaire "Int" et 2e point "Bm" pour top verticale Matrix
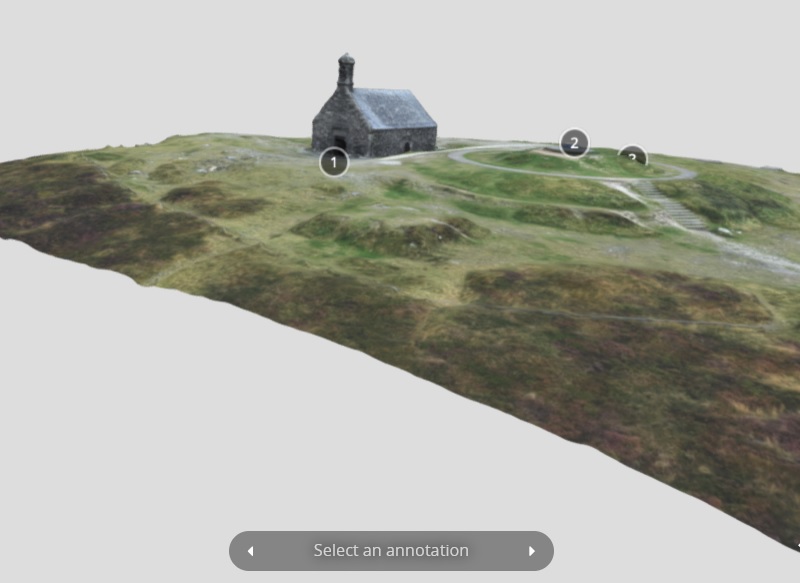
Vol 13/09/21 - Recopie écran Sketchfab montrant les "pastilles" de présentation 3D

Barre de guidage "TeeJet Matrix 430" - 13/09/21 - Installation sur console instruments Virus (ventouse) - Cable 12v sur allume-cigare - Antenne dans filet sous verrière

Chapelle de St Michel - 13/09/21 - Alignement METASHAPE des photos obliques prises sur hippodrome AB affiché en orange sur Matrix 430;
cet hippodrome correspond au cercle Orange R350m indiqué par barre guidage Matrix 430
et au cercle Rouge R360m tracé sur Google Earth si les tops verticales sont corrects;
il est suivi au mieux par le pilote pendant que le photographe maintient pointage APN sur chapelle; le résultat est la Chapelle en 3D de St-Michel

Barre de guidage "TeeJet Matrix 430" - Chapelle de St Michel - 13/09/21 - Hippodrome circulaire AB affiché en orange sur Matrix 430 et suivi au mieux par pilote

Chapelle de St Michel - 13/09/21 - Hippodromes: en Vert celui prévu sur Google Earth, en Orange celui généré par Matrix 430 après survol points Am, Cm (Intermédiaire) et Bm
Deux tours sont faits sur l'hippodrome pour pouvoir choisir la meilleure suite de photos prises. Au bout d'un tour (1 minute), il y a forcément changement des satellites reçus; un saut de position (3 à 10m) par rapport au cercle jaune a donc lieu.
La rampe d'épandage introduite dans Matrix 430 est de 30m: voir schéma des 3 portions de rampe de 10m sur le triangle jaune de position.
322 - Hippodrome en bandes pour photos verticales avec ULM 3 axes Coyote - Base ULM Le Stancou

13 Novembre 2021 - Le Stancou - Coyote 65 CV Rotax 582 (plage vitesse travail 90 à 100km/h)
Barre de guidage TeeJet Matrix 430 (travail mode DGPS avec satellite EGNOS 36) posée par ventouse sur parebrise - Clef USB pour récupérer les copies écran et CR des bandes faites en fin de vol

Prépa vol 06/11/21
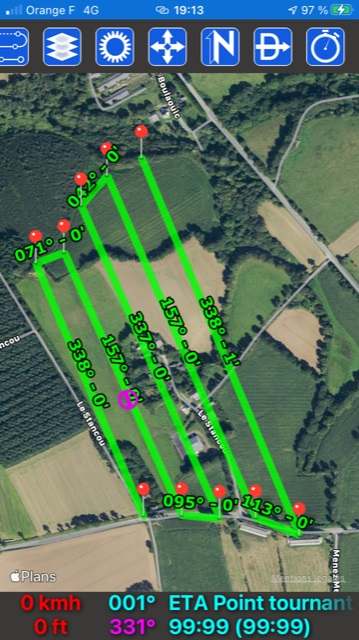
GOOGLE EARTH Menu "Ajouter" Sous-menu "Trajet" - Tracé des axes (en jaune) des 4 bandes
Déclenchement intervallomètre à vue verticale route (Rep1, Rep4, Rep5, Rep8) si Cap compas 340° (axe piste)
Base Large 83m = Espacement des axes bandes - Enregistrer "Trajet" en jaune au format KML
GPS Babel: Passer de KML à GPX
Easy GPS: Charger les 4 bandes dans Garmin
GarminGPSmap96C: Vérifier présence des 4 bandes au Stancou
Prépa vol 06/11/21
GPS Babel: Passer de KML à GPX
Prépa vol 06/11/21
Easy GPS: Tranférer les 4 bandes à suivre dans le Garmin
GarminGPSmap96C: Vérifier présence des 4 bandes au Stancou
Prépa vol 06/11/21
Remarquer sur Bande 0 (piste ULM) géoréférencée sur Google Earth pour Matrix 430
les traces décollage-atterrissage sur piste QFU 34 et roulage du Coyote (logo hélico) vers hangar
enregistrées lors de vols précédents;
Remarquer affichage overzoom 200 feet / largeur bande 84m
Logiciel SkyDream VFR - Prépa vol du 13/11/21
Impossible à synchroniser (Pb de mot de passe trop long à rentrer)
Vol 13/11/21 - En vol sur bande 0 de A vers B - Noter la correction de dérive (en crabe par rapport à l'axe jaune) et le polygône vert qui est le point B de fin de bande

Vol 13/11/21 - Recopie écran Sketchfab montrant les "pastilles" de présentation 3D

Le Stancou - 13/11/21 - Piste ULM (QFU 34-16) AERO-PLASS à gauche sur la reconstruction 3D avec hangar au centre en bas
Alignement METASHAPE des photos verticales prises sur axes AB affichés en orange sur Matrix 430 et numérotés de 0 à 2;
20 photos verticales sont prises automatiquement à la cadence de 2 secondes via l'intervallomètre externe "JJC";
10 à 11 photos par bande ont été ici extraites des paquets de 20 pour être traitées (Alignement, Nuage, Maillage, Texture) avec Metashape ;
les bandes noires en zig-zag sur les bois correspondent aux parties Ouest et Est masquées par les hauts donc non vues par l'appareil photo trop haut d'où l'intérêt ultérieurement de refaire un essai à 200m sol et
de compléter la prise de vues sensiblement cap au Nord (QFU 34) par une prise de vues à 90° du QFU 34 pour avoir les côtés Est et Ouest des maisons et des bois.
Le "report" de "traitement" photos verticales au format PDF indique clairement le loupé d'une bande.
CR traitement au format PDF - Quadrillage au pas de 100m - Largeur totale rampe programmée à 52m dans Matrix
Les bandes bleues correspondent
- à D à la couverture photos verticales;
- à G au retour du Coyote pour s'aligner, en faisant face au vent, sur le nouvel axe en jaune sur l'écran du Matrix 430.
4 - Utilisation du pod
La Prise de vues photogrammétriques du cours de l'Ecole Nationale des Sciences Géographiques (Laure Chandelier / Département Imagerie Aérienne et spatiale) est à lire attentivement.
La partie préparation de mission est supposée connue au niveau des procédures: prévisions EGNOS, focale APN et intervallomètre, récepteur GPS GARMIN, barre de guidage TeeJet.

5 - Ouverture sur l'avenir en 2022
Faire des vols sur ULM - Coyote, Virus (pas de haubans d'aile), autogire - ou sur avion DO27 (pas de haubans d'aile) porte ouverte afin d'améliorer le prototype de pod et la procédure de photos obliques et verticales.
Par beau temps, avec un éclairage lumineux sur le lieu des photos, éviter les photos floues (variation altitude prise de vues) avec SONY E 30mm / 3.5 dans une série de 20 photos commandée par intervallomètre externe "JJC" en travaillant en "mode A" (priorité ouverture) avec ouverture à f/8 (voir courriel PHOTO AN ORIENT du 18/11/2021) et non en "mode automatique".
51 - Photos obliques avec barre porteuse 2 APN
L'objectif est d'avoir une reconstruction 3D "propre" en prenant les meilleurs résultats si 2 barres porteuses afin de présenter en 3D sur Sketchfab:
- une "partie significative de la ville" avec F 30mm;
- le "monument" avec F 100mm en choisissant à la reconstruction après "alignement" avec Metashape un volume de calcul réduit à un cube de 300m de côté englobant le "monument" visé.
POI possibles en Arcoat:
- Le Faouët: Ht AGL 460m, Rayon hippodrome 800m, Vi 85KT / 35 et 100mm, intervalle 2 s / POI 1 et POI 2 = "halles" pour barres porteuses 1 et 2;
- Quelven: Ht AGL 460m, Rayon hippodrome 800m, Vi 85KT / 35 et 100mm, intervalle 2 s / POI 1 et POI 2 = "église" pour barres porteuses 1 et 2.
S
511 - Avion DO 27
- Photographe 1 (Sony A6000 / 30mm / APS-C et Sony A6400 / 18-200mm / APS-C) utilise barre porteuse 1 décrite ci-dessus; dimensions CMOS APS-C et "taille image" utilisées pour le calcul des paramètres de vol: 23.5x15.5mm, 6016x4016 pixels, Large soit 24 M pix
- Photographe 2 (Canon 80D / 13-135mm / APS-C) et photographe 3 (Canon 90D / 18-200mm / APS-C) se procurent télécommandes radio ad hoc pour Canon; si fonctionnement radio correct des 2 Canon sur le même canal 2.4Ghz (par exemple canal 56; barre 1 prend canal 1), ils construisent barre porteuse 2 de 33cm avec 2 supports Takeway R2.
512 - ULM 3 axes Virus
Porte gauche démontée; évolution à 120-130km/h; un seul photographe; procédure idem ULM Coyote ou avion DO 27.
513 - ULM autogire type MTO
Procédure idem ULM Coyote ou avion DO 27.
52 - Photos verticales avec barre de guidage Matrix 430 et pod BLOP-WIC
Procédure idem 13/11/21 sur ULM Coyote avec 4 bandes en lui ajoutant la réalisation de 4 autres bandes à 90° afin d'avoir des vues N, S, E, O des constructions et bois grâce aux recouvrements (longitudinal 72%, latéral 60%).
Comparer 3D avec celui réalisé sur Métairie avec le done DJI Mavic Pro utilisant un hippodrome type quadrillage à 50m sol.
53 - TeeJet et Matrix 430
De Septembre à Novembre 2021, les essais du GPS agriculture de précision TeeJet Matrix 430, monté sur ULM 3 axes Coyote et Virus afin de guider le pilote pour réaliser des suites de photos aériennes (obliques, verticales), ont montré sa bonne ergonomie au niveau mise en oeuvre et guidage. L'intérêt de cette barre de guidage est d'être 5 à 10 fois moins cher que la concurrence (par exemple AG-NAV avec RTK précision 3 cm); elle fonctionne simplement en GPS différentiel avec un des satellites EGNOS (précision de l'ordre de 3m).
Il serait intéressant d'entrer en contact avec le bureau R&D de TeeJet, via PROMODIS son principal revendeur en France, pour lui demander de modifier l'entrée A et B dans un logiciel Matrix 430 vs expérimentale afin d'offrir à l'utilisateur la possibilité de le guider avec précision dans son travail
- soit au sol en tracteur pour épandage,
- soit en vol en ULM pour épandage aérien ou pour photos aériennes.
Le pilote devrait pouvoir introduire les points A et B par leurs coordonnées Lat/lon prises sur Google Earth (couverture photo mondiale et gratuite) qui serviraient à matérialiser sur l'écran Matrix 430:
- l'axe AB si traitement ou photos en bandes;
- le cercle de diamètre AB si traitement ou photos en cercle.
Cette modification pourrait ouvrir un nouveau marché, celui de l'ULM, à TeeJet avec son Matrix 430 qui reçoit parfaitement les signaux GPS et EGNOS à plus de 150m sol (altitude minimum de vol ULM ou avion).
Les essais de ce logiciel Matrix 430 vs "expérimentale" pourraient être faits en France en suivant la procédure utilisée ci-dessus définie initialement pour le plaisir de voler avec l'objectif de mettre en oeuvre les nouvelles technologies.
_________
PS: Merci de donner remarques, idées ou le bonjour encliquant ci-dessous:
christian.degastines@orange.fr
Retour à SOMMAIRE